Actu

Déménager pas cher : choisir une plateforme de déménagement
Un déménagement mal orchestré peut s’avérer couteux, sans oublier que vous pourriez en sortir avec des biens abîmés parce que mal emballés ou mal entretenus. C’est ...




Déco
-
Rose éternelle dans la décoration
Les roses funéraires sont quelques-unes des fleurs les plus courantes à donner et à recevoir quand un être cher meurt. Non seulement ils apportent ... -
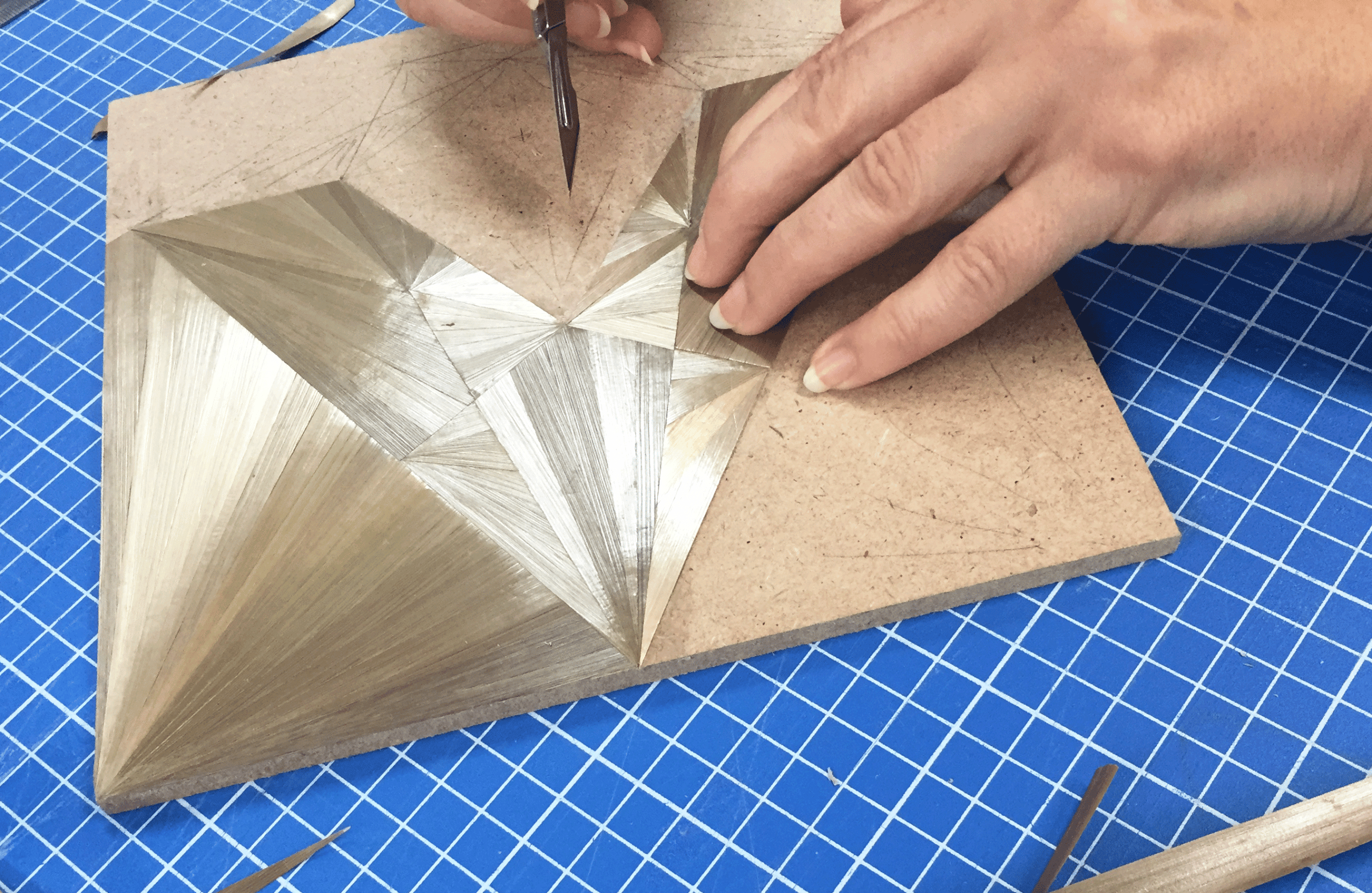
Comment réalise-t-on la marqueterie de paille ?
Dans le monde de la décoration, l’imagination et la créativité n’ont pas de limite. Et pour réaliser des produits merveilleux, les décorateurs, qu’ils soient ...